
定义
用于描述光学元件和系统的数学空间。
在几何光学中,广泛使用了物体和图像空间的概念。 在最简单的情况下,物体和图像空间与纵向延伸为零的单个光学元件相关联,例如,两个透明光学介质之间的平面或弯曲界面。 在第一种方法中,可以将对象空间视为该接口之前的空间,将图像空间视为位于该接口之后的图像空间;人们有时会发现暗示这一点的图纸。 但是,通常的做法是同时考虑对象和图像空间以跨越整个空间。 例如,可以将物体侧的任何光线外推到图像侧 - 而不考虑界面的任何变化 - 以在整个对象空间中获得这些射线。 同样,人们可以推断出图像侧的任何光线。 通过外推在某个点相遇的会聚光线,可以获得虚拟点。 例如,在图像空间中,可以具有对象点的虚拟图像。
因此,对象空间可以包含光学系统之前的真实对象点和其后面的虚拟对象点。 同样,图像空间可以包含系统后面的真实图像点和系统前面的虚拟图像点。 例如,当使用照相机时,处理相机前方的真实物体点,这些点与胶片或图像传感器上的真实图像点有关。
图1显示了双凹透镜(因此散焦)镜头改变真实物体外观的情况:在图像侧,光线似乎来自虚拟物体位置,尽管位于镜头左侧,但这是图像空间的一部分。 另一方面,物体空间包含来自物体的光线,不受透镜的影响。
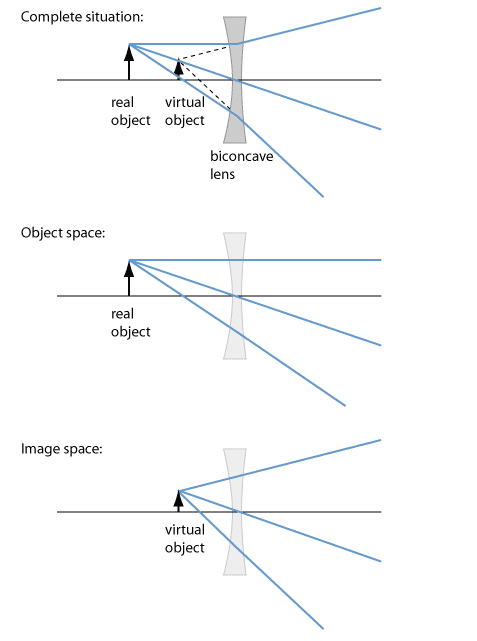
图1:当通过聚焦镜头观察物体时,它似乎位于更近的位置并且尺寸较小。对象的虚拟图像是一个图像空间,它不包含真实对象。
使用聚焦透镜的放大镜也会发现类似的情况。
人们可以轻松地将物体和图像空间的概念应用于由多个光学元件组成的扩展光学系统。
在图纸中,通常将对象和图像空间的项目同时显示(如图 1 的顶部所示)。 为了避免在图纸或文字中混淆,可以使用一些适当的标签系统。 例如,可以用大写字母表示所有点,仅为所有点和图像空间添加一个素数。
光学成像系统永远无法对物体空间的所有点进行成像。 不仅对象空间还包括系统后面的点,而且对系统之前的点进行成像的位置也存在限制。 特别是,视野有限,此外,通常还存在锐利成像的限制;例如,可能无法将相机聚焦在非常近的物体上。

