
定义
驱动模式是指在电阻抗断层成像过程中,对成像目标施加激励的方法或者策略。
EIT采用的是体表激励和体表测量技术,导致测量数据中反映成像目标边界区域的信息较多,而反映内部的信息较少;另一方面,由于EIT是一种非线性影像重构技术,且重构过程复杂、非线性、病态性严重,对原始数据的信噪比要求很高,并最终决定成像质量。因此,寻求较优的激励方法以获取更多的内部信息和高信噪比的测量数据是EIT的关键问题之一。
驱动模式分类
驱动模式按照激励源的性质可以分为电流驱动模式(current driven pattern)和电压驱动模式(voltage driven pattern),按施加激励的技术可以分为注入驱动模式和感应驱动模式。
电流驱动模式以恒流源作为驱动源,其优点是:(1)可以精确地控制注入人体内部的电流,确保人体安全;(2)简化重建过程;高频、高精度的恒流源在设计上有一定的困难;
电压驱动模式以恒压源作为激励源,其优点是高频、高精度的恒压源较容易实现,但是难以精确控制注入人体内部的电流,可能使通过局部组织的电流超过安全限,损伤人体组织,一般只在对激励频率有特殊要求时使用电压驱动。
电流驱动模式
EIT中逆问题的目的就是根据测量的多组边界电压数据以及其他一些约束条件来重建场域内的电导率分布。通常独立测量的次数越多,就可以重建出更多场域离散单元的电导率,重建图像的分辨率和更高。
1、相邻驱动模式(adjacent driven pattern)
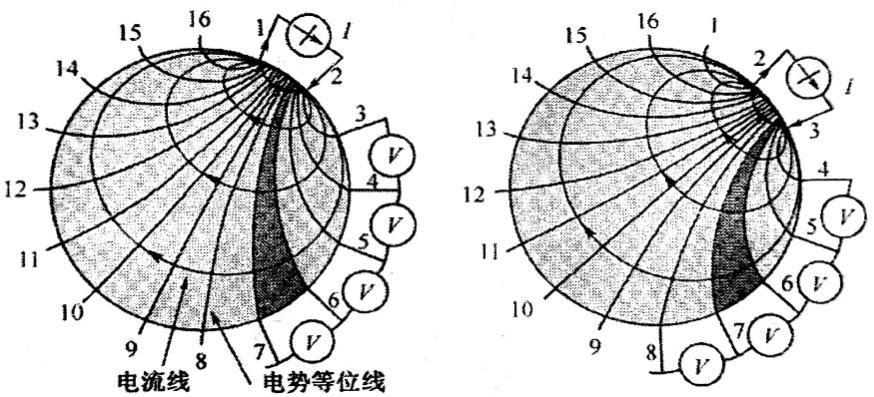
图 1 带有16个等间隔电极的圆柱形导体,采用相邻驱动模式采集数据
电流通过相邻电极注入,而电压测量是在所有其他相邻的电极对上进行,称为相邻驱动模式。这是一种最基本的驱动模式,硬件上易于实现,且相应的重构算法多,较为成熟。如图1所示为相邻驱动模式示意图。电流首先通过电极1和2施加,电压从3-4,4-5,…,15-16电极对连续测量,得到一组含有13个电压值的数据,而后电流切换至电极2和3,可以得到另一组含有13个电压值的数据;电流的注入顺序是1-2,2-3,3-4,…,16-1,一共可以获得(16-3)×16/2=104个独立电压测量值。
2、交叉驱动模式
当在一对彼此距离较远的电极上注入电流时,可以获得一种流入被测场域内更均匀得电流分布。研究人员Avis和Barber提出交叉驱动模式,两驱动电极相差90°放置,并在相邻电极上连续测量电压。
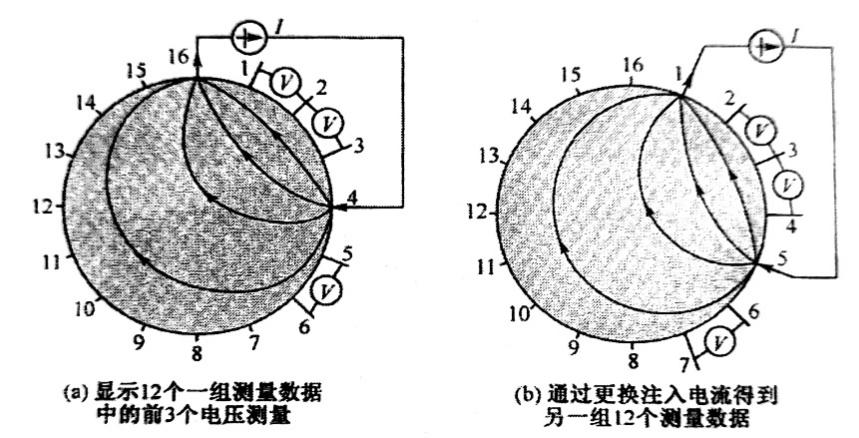
图 2 带有16个等间隔电极的圆柱形导体,采用交叉驱动模式采集数据
3、相对驱动模式
两激励电极相差180°放置,在相邻电极上进行电压测量。如图3所示,电流首先通过16号和8号电极施加,从1-2,….,6-7,9-10,…,14-15电极连续测量电压,得到一组含有12个独立测量值的电压数据。对于16电极的系统,一共可以得到(16-3)×16/2=96个电压测量值。在相对驱动模式中,电流分布相对均匀,具有良好的敏感性。
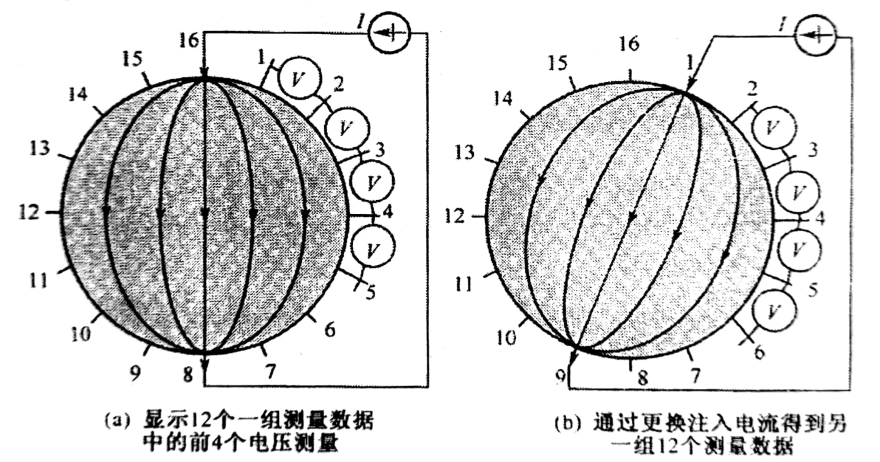
图 3 带有16个等间隔电极的圆柱形导体,采用相对驱动模式采集数据
4、自适应驱动模式
自适应驱动模式由Gisser、Isaacson和Newell等于1987年提出,也称为最优驱动模式,以多个或全部电极作为驱动电极,在一定约束条件下根据确定的优化准则决定各驱动电极中的驱动电流(电压),以期获得高信噪比的测量数据,并通过相应的重构算法得到较好的成像结果。
性能比较
相邻驱动模式、交叉驱动模式、相对驱动模式是应用比较普遍的三种电阻抗测量方式。其中,相邻驱动模式对硬件的要求最高,而相对驱动模式对硬件要求最低,测量精度最高。从驱动模式的分辨率来看,相邻驱动模式下矩阵的秩是由正投影矩阵决定的,而在相对驱动模式下则由反投影矩阵决定,如果成像应用了滤波反投影算法,应该避免采用相对驱动模式。
参考文献
[1] 何为, 罗辞勇, 徐征, 等. 电阻抗成像原理[M]. 北京:科学出版社, 2009.
参阅:EIT、信噪比、滤波反投影算法、恒流源、恒压源

