
定义
单应性(Homography)指的是同一个无镜头畸变的相机从不同位置拍摄同一平面物体的图像之间存在单应性,可以用投影变换表示,图一表示单应性示意图。单应性矩阵[1]指的是摄像头标定中,从物体的真实世界坐标到理想像素点之间的投影矩阵。单应性在图像校正、图像拼接、相机位姿估计、增强现实等领域有非常重要的作用。
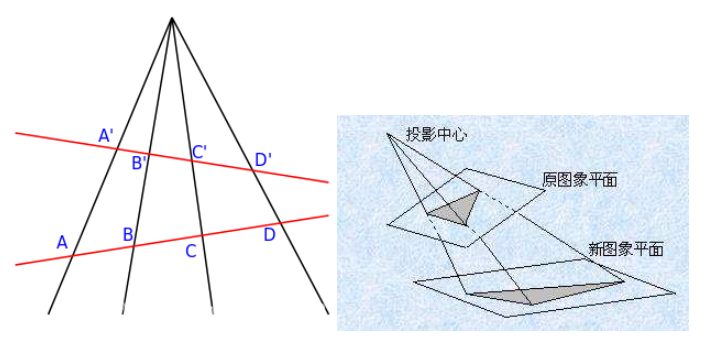
图 1 单应性示意图
假设矩阵H会讲一幅图像上的一个点的坐标a=(x,y,1)映射成另一幅图像上的点的坐标b=(x1,y1,1),也就是说我们已知a和b,则会用如下公式:
![]()
其中H则为单应性矩阵,通过极大似然估计或SVD分解求解单应性矩阵。
参考文献
[1] Ueshiba, Toshio, and Fumiaki Tomita. "Plane-based calibration algorithm for multi-camera systems via factorization of homography matrices." null. IEEE, 2003.
[2] Harker, Matthew, and Paul O'Leary. "Computation of Homographies." BMVC. 2005.

