
定义
加速的具有鲁棒性的图像特征提取方法。
SURF意为加速的具有鲁棒性的特征(Speeded Up Robust Features),由Bay在2006年首次提出,这项技术可以应用于计算机视觉的物体识别以及3D重构中。SURF算子由SIFT算子改进而来,一般来说,标准的SURF算子比SIFT算子快好几倍,并且在多幅图片下具有更好的稳定性。
特征点使用了Hessian矩阵。当Hessian矩阵的判别式取得局部极大值时,判定当前点是比周围邻域内其他点更亮或更暗的点,由此来定位关键点的位置。计算Hessian特征值需要高斯滤波,这里使用了盒式滤波器来近似替代高斯滤波器。上边两幅图是9*9高斯滤波器模板分别在图像上垂直方向上二阶导数对应的值,下边两幅图是使用盒式滤波器对其近似,灰色部分的像素值为0,黑色为-2,白色为1。盒式滤波器对图像的滤波转化成计算图像上不同区域间像素和的加减运算问题,这正是积分图的强项,只需要简单几次查找积分图就可以完成。
 |
 |
同SIFT一样,SURF的尺度空间也是由O组L成组成,不同的是, SIFT中下一组图像的尺寸是上一组的一半,同一组间图像尺寸一样,但是所使用的高斯模糊系数逐渐增大;而在SURF中,不同组间图像的尺寸都是一致的,不同的是不同组间使用的盒式滤波器的模板尺寸逐渐增大,同一组间不同层间使用相同尺寸的滤波器,但是滤波器的模糊系数逐渐增大。
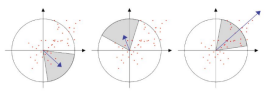
特征点主方向分配上,SURF采用的是统计特征点圆形邻域内的harr小波特征。即在特征点的圆形邻域内,统计60度扇形内所有点的水平、垂直harr小波特征总和,然后扇形以0.2弧度大小的间隔进行旋转并再次统计该区域内harr小波特征值之后,最后将值最大的那个扇形的方向作为该特征点的主方向。
 |
 |
生成特征点描述子也是在特征点周围取一个4*4的矩形区域块,但是所取得矩形区域方向是沿着特征点的主方向。每个子区域统计25个像素的水平方向和垂直方向的haar小波特征,这里的水平和垂直方向都是相对主方向而言的。该haar小波特征为水平方向值之后、垂直方向值之后、水平方向绝对值之后以及垂直方向绝对值之和4个方向。

积分图在Hessian矩阵上的使用和降维的特征描述子的使用,使得SURF比SIFT效率更高。SIFT在尺度和旋转变换的情况下效果最好,SURF在亮度变化下匹配效果最好,在模糊方面优于SIFT,而尺度和旋转的变化不及SIFT,旋转不变上比SIFT差很多。速度上看,SURF是SIFT速度的3倍。
参考文献
[1] Bay H . SURF: Speeded Up Robust Features[J]. Computer Vision & Image Understanding, 2006, 110(3):404-417.

