
定义
一种基于灰度的角点检测算法。
在介绍Harris角点算法之前,首先要说到Moravec角点检测算法。1977年,Moravec提出了兴趣点(Points of Interests)的概念,后来在1981年提出了Moravec角点检测算法。这种算法的思想很朴素,考虑到肉眼观察角点,会发现如下特征:
1、如果图片在窗口附近变化平坦,窗口所有方向上的移动只会引起窗口内对应像素灰度值微小的变化,如下图(a)所示。
2、如果窗口位于图像边缘上,那么顺着边缘方向上的移动引起上述值微小的变化,垂直于边缘方向上的移动将引起巨大的变化,如下图(b)所示。
3、如果窗口位于图像的角点上,则所有方向上的移动都将造成窗口内对应像素灰度值巨大的变化,如下图(c)所示。

Moravec算法就实现了这样的想法:采用窗口模板,使用若干个方向的变化最小值作为角点响应值。具体来说主要包括四个过程:
1、计算图像中各像素的兴趣值。在以像素为中心的图像窗口(比如)中,计算水平、垂直、对角线、反对角线四个方向的相邻像素灰度差的平方和。

2、给定一个经验阈值,将兴趣值大于该阈值的像素作为候选角点。
3、局部非极大值抑制选取角点,即在一定大小的窗口中,将候选角点中兴趣值最大的作为角点。
4、如果两个角点之间的距离过短,那么去掉其中一个角点。
而Harris角点检测算法是对Moravec角点检测方法的改进。受信号处理中自相关函数的启发,可以给出图像中某一像素点的自相关矩阵时,其特征值是自相关函数的一阶曲率,如果X,Y两个方向上的曲率值都高,那么就认为该点是角点。主要改进有如下几点:
1、算子用高斯函数代替Moravec的二值窗口函数,对离中心点越近的像素赋于越大的权重,以减少噪声影响。
2、Moravec算子只考虑了每隔45度方向,Harris算子用Taylor展开去近似任意方向。
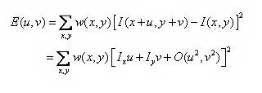
其中,Ix为x方向的差分,Iy为y方向的差分,w为高斯函数。
3、Harris采用了一种新的角点判定方法。矩阵M的两个特征向量l1和l2与矩阵M的主曲率成正比。Harris利用l1, l2来表征变化最快和最慢的两个方向。如果两个曲率都较大,则局部自相关函数呈山顶形状:所有方向的移动引起E剧烈的变化,此时窗口处于图像的角点处。如果其中一个曲率较大而另一个较小,即局部自相关函数呈山脊状。沿着山脊的移动引起E微小的变化,此时窗口处于图像边缘处。如果两个曲率都较小,即局部自相关函数整体较平坦,则所有方向上的移动将引起E的微小变化。因此,如果两个特征值都是极大值,那么该点是一个特征点。
Harris 算子对图像中的每个点都计算其兴趣值,然后在邻域中选择最优点。而且计算公式中只涉及到一阶导数,因此对图像旋转、灰度变化、噪声影响和视点变换不敏感,它也是比较稳定的一种点特征提取算子。但是它对尺度很敏感,一个尺度下是角点, 在在另一个尺度下可能就不是了。如下图所示:

参考文献
[1] Moravec H P. Obstacle avoidance and navigation in the real world by a seeing robot rover[R]. Stanford Univ Ca Dept of Computer Science, 1980.
[2] Harris C G, Stephens M. A combined corner and edge detector[C]//Alvey vision conference. 1988, 15(50): 10-5244.
参阅:Moravec角点检测、Harris角点检测

